
在不到一美元,新的GaN激光驱动器表明无处不在的激光雷达的方式
2021年2月23日经过杰克赫兹通过高度集成的GaN激光驱动芯片,将间接飞行时间(IToF)应用到手机、平板电脑、无人机甚至玩具机器人上可能成为可能。
而激光雷达和直接飞行时间设备间接飞行时间技术经常因其在自动驾驶汽车中的作用而受到关注,但它正在消费者应用领域取得进展,就像我们在自动吸尘器上看到的那样。
虽然直接飞行时间激光雷达最常见于ADA,但间接的飞行时间正在进入仅需要短程映射的消费者设备。使用EPC的图片(修改)
许多技术铰链在激光雷达的改进,但LIDAR本身在甚至更低的组件水平上提高了铰链。具体地,GaN晶体管的进步已经证明是开发高复杂的激光雷达系统的积分。
该领域的领导者,高效的电力转换(EPC)一直在为LIDAR开发GAN,但现在已经进一步迈出了一步,将可达的GaN的激光雷达技术带入消费者竞技场。所有关于电路与EPC首席执行官Alex Lidow发言该公司最新的激光驱动芯片以及他认为它将如何彻底改变激光雷达。
为什么Gan是偶联的方式
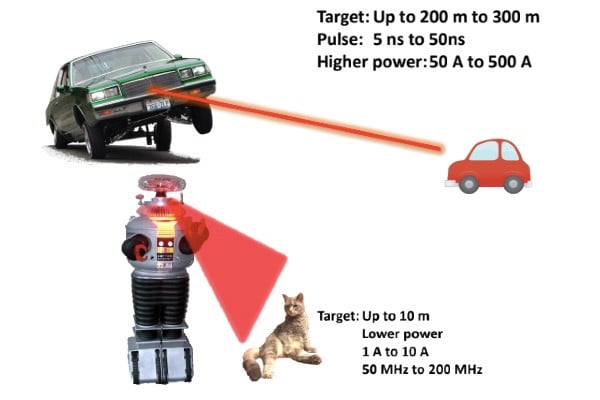
激光雷达系统从垂直腔面发射激光器(VCSEL)发出光脉冲,需要非常快的高功率电气控制,升降时间很短。这是GaN有利于激光雷达系统的原因之一。GaN提供了比硅fet快得多的开关时间,在高电流下允许短脉冲宽度。
自从此以来,此功能对激光乐队至关重要较短的脉冲宽度导致更高的分辨率,而高脉冲电流允许LIDAR系统进一步看。
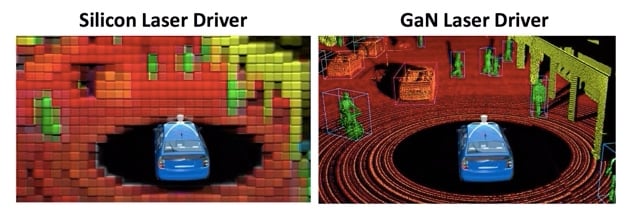
GaN提供比硅更高分辨率的激光雷达解决方案。截图使用EPC.
GaN还提供更好的热性能。“恒定限制始终由激光,”LiDow备注。“当发生这种情况时,将激光器运行到其热限制,这些氮化镓器件甚至是温暖的。”
Lidow指出,虽然你可以用硅制造激光雷达系统,但这些设备的性能并不比雷达好。
“一个坏的激光雷达系统并不比一个好的雷达系统值钱,”Lidow说。“但现在一个好的雷达系统总是会更便宜,因为这样的系统太多了。”
传统的激光司机的麻烦
在传统的LIDAR系统中,您通常会找到硅驱动器IC,驾驶甘FET反过来,将电流泵入激光雷达激光系统。
这些元件的接口是整个系统的限制因素之一,因为电感在互连严重减慢了控制信号。这意味着更慢的上升和下降时间,最终更宽的脉冲宽度,这意味着更差的分辨率。
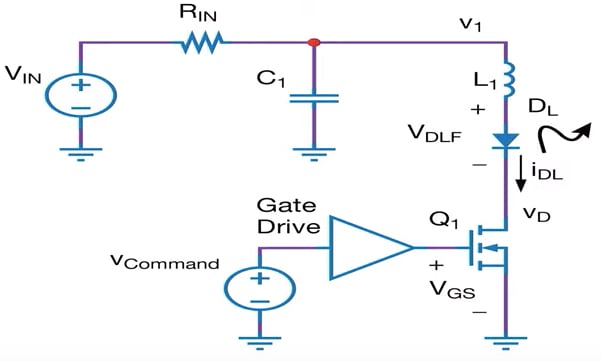
传统的激光雷达系统。截图使用EPC.
“问题来自于硅驱动与氮化镓场效应晶体管的接口。这就成了整个电路的限速部分。”利多解释道。“首先,硅不像氮化镓那么快,但是第二,在这两者之间(互连)有电感。电感是减慢信号速度的因素。我们说的是几十皮秒。”
一种用于间接飞行时间的新型集成激光驱动器
EPC对这个问题的解决方案是:集成。
该公司的新产品,EPC21601.,将GaN驱动器与GaN FET集成到单个IC上,消除了互连电感并去除传统激光雷达电路的速率限制方面。EPC设想10A,40 V激光驱动器IC在间接中有用飞行时间(ITOF)应用程序。
据称,这种新型集成电路的尺寸为1.5 mm x 1.0 mm,在PCB上比传统的集成电路小36%。
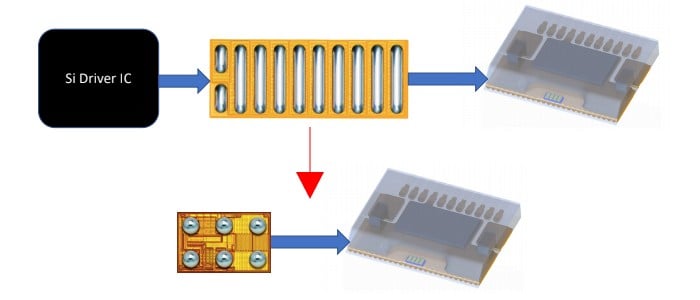
具有硅驱动器IC与EPC集成的LIDAR系统的传统激光雷达系统,其中一个IC中的GaN驱动器和GaN FET。使用EPC的图片(修改)
根据EPC,这种综合解决方案也具有可衡量的速度和性能改善度量。“它将大约50个Picohenries从大约50个Picohenries的电感降低到几个皮高中,”Lidow说。“脉冲是1.4纳秒宽,下降时间是245皮秒,上升时间为470皮秒,即靠近限制你衡量的能力。“
民主化激光雷达
通过将LIDAR驱动电路集成到单个IC上,EPC旨在使LIDAR更实惠并在升高杆以进行性能的同时更实惠。随着芯片成本约为1美元,Lidow预测它对廉价激光雷达的竞争可能会结束复杂的激光雷达将开始逐步出现在各个产品中。

EPC21601的功能框图。图片由EPC.
在可能的用例中,Livow表示,“我特别兴奋的是,现在你不必担心多筹码,你可以在美元下获得它们。”
他继续说道,
“这个激光驱动器IC开辟了消费者市场,它通过手机,片剂,无人机或您想要的任何其他任何其他任何其他东西,打开使用三维意识和激光雷达的使用。如果你正在制作一个玩具机器人,你现在可以把一个激光雷达系统放入其中。“






看着GaN Fets的规格,我认为它们不会比硅更快。我一直在寻找一个快速的FET,用于驱动100 ns的激光二极管。脉冲。我所看到的是,碳化硅非常快。例如,此IXYS LSIC1MO120E0080 FET(一个LittleFuse Company)具有以下动态规范:打开延迟= 10 ns上升时间= 10 ns关闭延迟= 16 ns umpount = 8ns。如果您发现更快的FET请在这里发布。谢谢。